Hextech Mechahand v13
Hextech Mechahand version 13
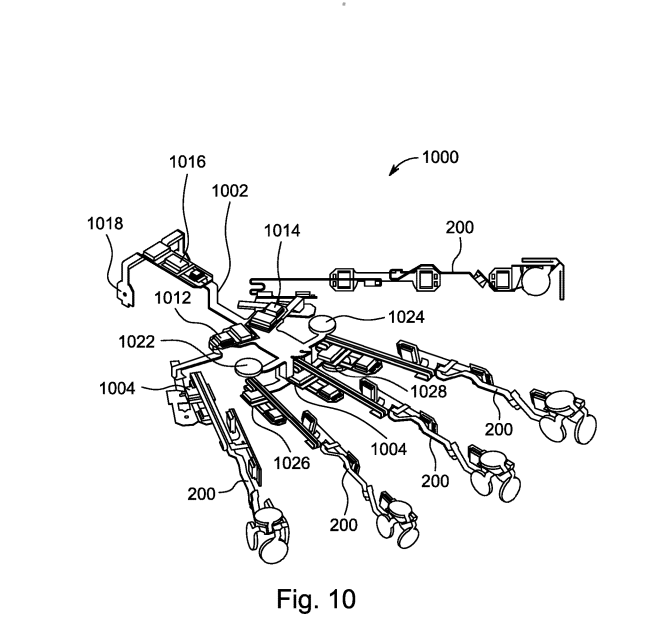
Patent pending sensor design! Feel free to check out the publication document if you want to fill your head with superflously worded design descriptions.
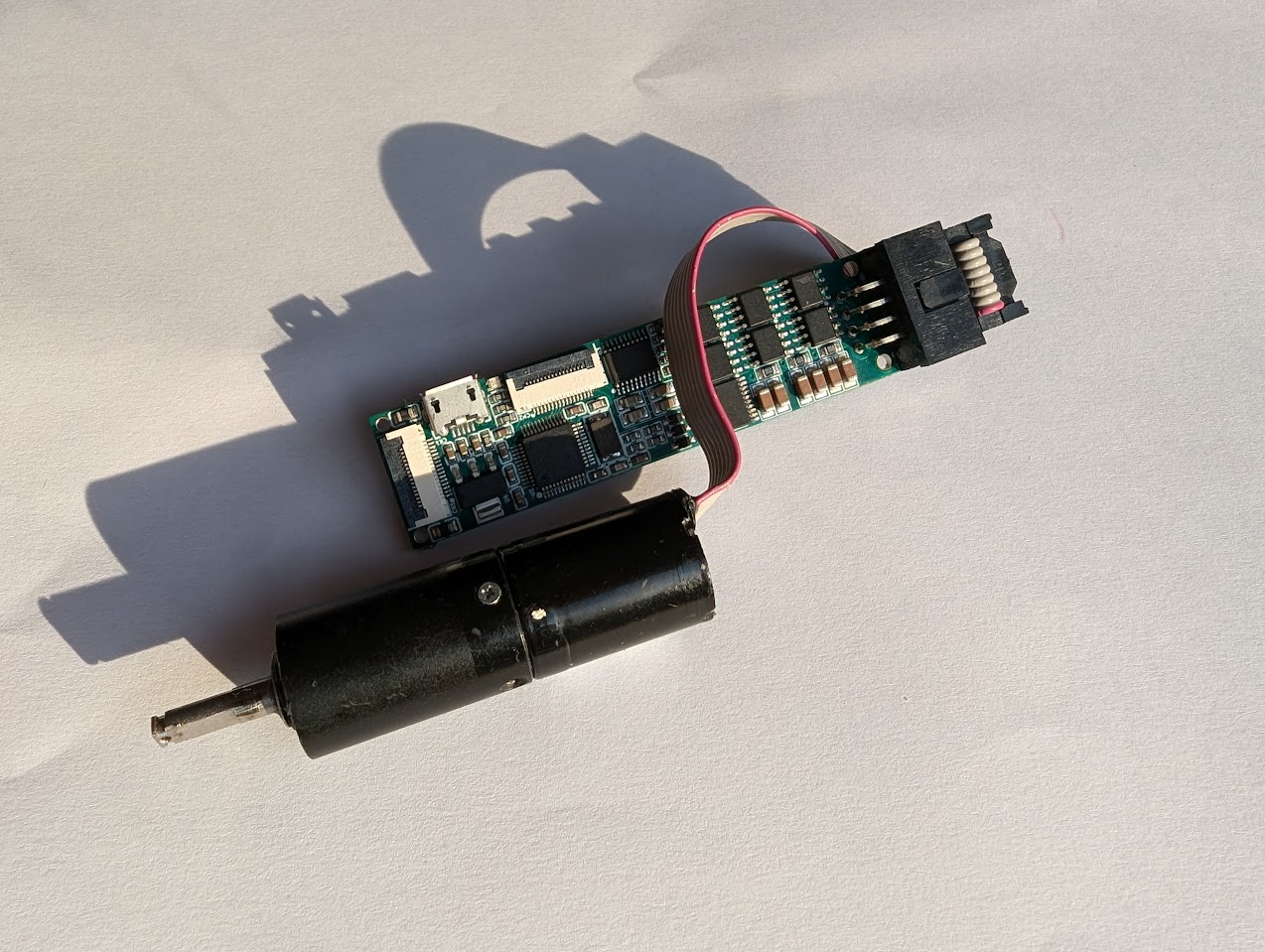
Unfortunately the motors are once again the source of all grief. I am asking them for a lot more torque than their little gears are capable of giving, so the little gears give up. We need a planetary gearbox with certainty to distribute the load on at least 3 micro gears. Unfortunately again, there are not many cheap choices for quiet, small DC motors with extremely sturdy planetary gears. The saving grace is that there are many options for brushless motors with planetary gears, but we need a brushless motor driver. Particularly, we need a brushless motor driver with current control (aka FOC control), but of course, no cheap options on the market. So we shall build our own!
And so we have done!
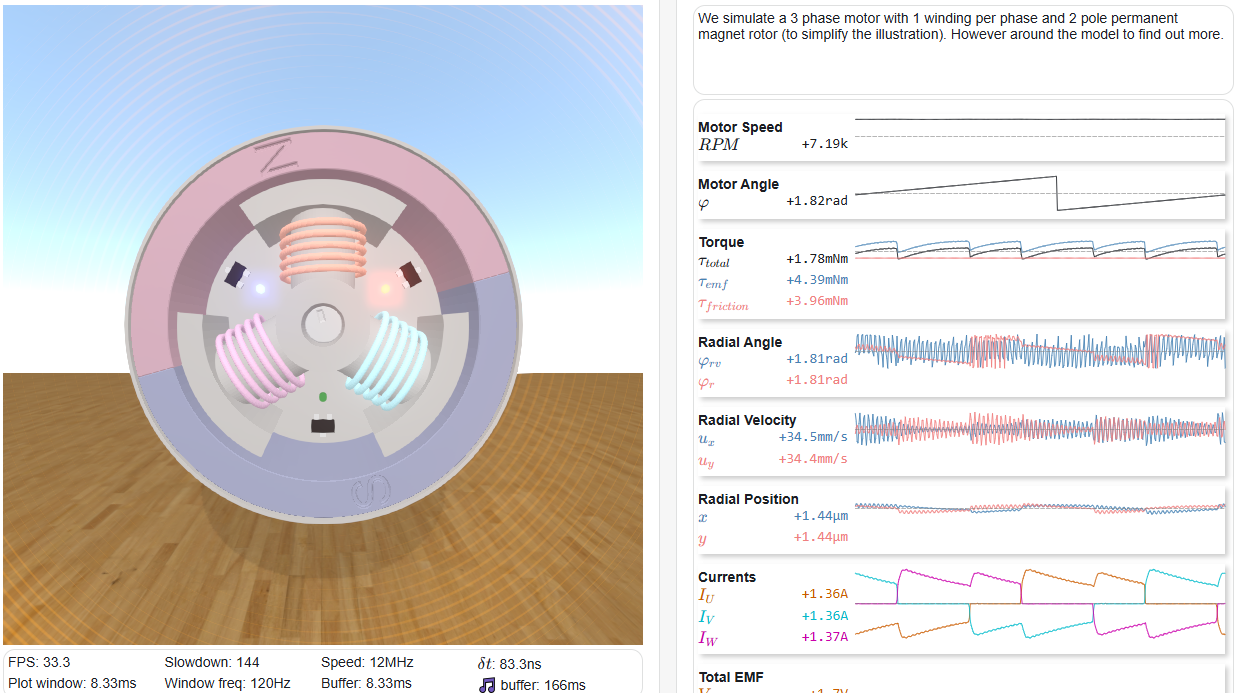
But now we need to drive it with the codes, and the codes require complex maths running at crazy fast speeds (needs to be over 20kHz to prevent audible noise). Thus I decided to also build a motor simulator that accuratly models the physics at the 72MHz clock rate of the STM32 chip that we will use to drive the motor.
Check out the motor simulator app, it’s interactve!